Исследователи из Вашингтонского университета под руководством доцента Сойера Фуллера (Sawyer Fuller) продемонстрировали действующий прототип крошечного летающего робота RoboFly размером с муху. До этого ни одной команде инженеров не удавалось сделать роботов столь малых габаритов автономными.
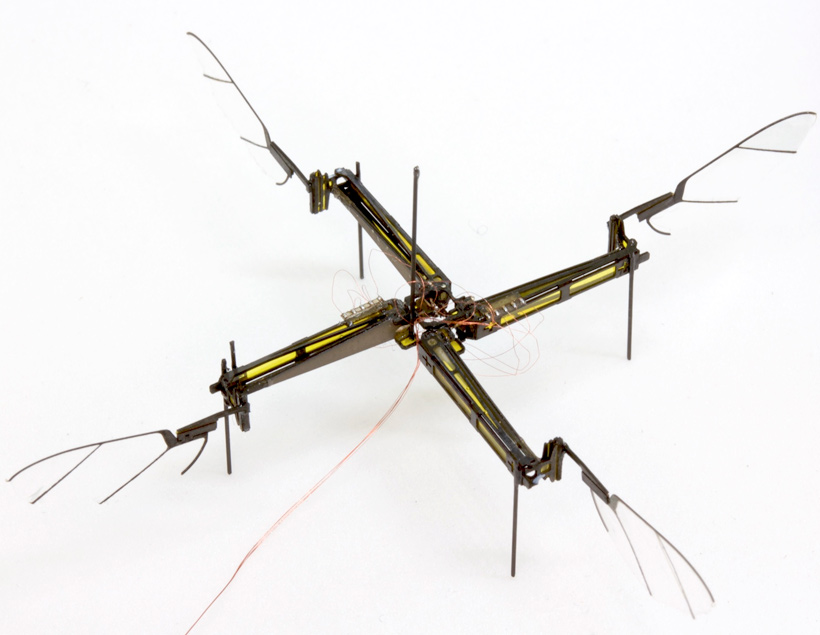
Для облегчения конструкции у RoboFly вместо печатной платы применяется гибкая электроника. Роль источника питания выполняет фотоэлектрическая пластина, которая закреплена над роботом. На фотографии вы видите, как на неё светит луч красного лазера, однако он показан лишь для наглядности. В реальных условиях крошечные «солнечные батареи» облучают импульсами ИК-лазера, вспышки которого не видны невооружённым глазом.

Поэтическая фраза о том, что RoboFly стал первым роботом-насекомым, разорвавшим земные путы, – сильное преувеличение. Пока разработчикам удалось добиться только отрыва RoboFly от стола и очень кратковременного поддержания полёта. Они расправляют крошечные крылья и совершают ими взмахи, но пока не способны удерживаться в воздухе сколь-нибудь продолжительное время.
Для набора высоты, управляемого горизонтального полёта и тем более – преодоления ветра, RoboFly потребуется совершать гораздо более интенсивные взмахи, чем робот способен делать сейчас. Основная проблема в том, что «солнечная панель» не даёт достаточно энергии, а тонкоплёночные элементы не рассчитаны на большую силу тока. Поэтому авторы изобретения экспериментируют с альтернативным размещением панелей и повышающим DC-DС преобразователем.Рабочее напряжение фотоэлектрических пластин составляет 7 В и в текущей версии повышается до 240 В. Это позволяет добавлять пластины и получать большую мощность при меньшей силе тока. Конечно, прирост достигается ценой дополнительных потерь энергии и риска пробоя диэлектрических слоёв, а саму схему всё ещё требуется сделать более легковесной. Однако уже сейчас DC-DC конвертер и микроконтроллер удалось разместить на одной схеме требуемых габаритов.

В будущем исследователи планируют использовать рой насекомоподобных роботов для самых разных целей – разведки и скрытого наблюдения, контроля роста посевов на фермах, обнаружения утечек газа, изучения поведения насекомых и других задач, где требуется незаметность или малые габариты.
Публичная демонстрация RoboFly пройдёт 23 мая на Международной конференции по робототехнике и автоматизации в Брисбене (Австралия).
Источник: http://www.washington.edu/news/2018/05/15/robofly/